I.
Définition :
Ces machines appartiennent à la famille des convertisseurs
d’énergie réversibles.
Elles sont capables de fournir :
- Du
courant électrique continu en permanence, tant qu’elles
sont entraînées en rotation.
- Du
mouvement rotatif, accompagné de couple, en permanence, tant
qu’elles sont alimentées.
La notion de permanence est associée au fait, que le courant
ou le mouvement produit, sont constants dans le temps.
Ils peuvent fonctionner « tel quel »
Il n’y a pas de structure interne de commutation ou de
régulation, comme c’est le cas dans les moteurs de type « Brushless »
Ce type de machine possède :
- Un
induit ou se réalise les conversions d’énergies courant ou force, selon
les lois de Laplace. L’induit est sur la partie tournante ou
« rotor »
- Un
groupe de bobine, nommé « inducteur », qui va produire le
magnétisme nécessaire à l’application de lois déjà citées. L’inducteur est
sur la partie fixe ou « stator »
I.
Famille de moteurs.
Il existe deux grosses familles
de moteurs :
- Le
moteur axial, avec charbons et collecteur.
·
Ils sont « plus
long que large » Ils sont réversibles. Ils ont besoin d’une
induction produite par des bobines, qui ont le nom d’inducteur. La manière dont
les inducteurs seront couplés avec le reste de la machine, détermine le type de
machine rencontrée ; « série », « parallèle » ou
« shunt », « composé, série parallèle » ou
« compound »
·
Ce type de machine est de 2
à 3 fois plus volumineuse, que ses consœurs asynchrones, utilisant du courant
alternatif.
·
L’usage en moteur se constate de moins en moins dans l’industrie.
Ils sont progressivement remplacés par des moteurs asynchrones, pilotés en
fréquence.
·
Les moteurs les plus
utilisés sont de type « série », car ils peuvent être utilisés aussi
bien, avec du courant continu qu’avec du courant alternatif. Ils prennent alors
le nom de « moteurs universels » Les intensités absorbées en courant
continu, seront plus élevées, car il n’y a pas de phénomène de réactance. On
rencontre les moteurs « série » dans les outillages portatifs ou dans
l’électroménager.
·
Les moteurs axiaux risquent
de voir leur vitesse augmenter inconsidérément. Les moteurs risquent
d’exploser, avec la force centrifuge. On dit que le moteur s’est « emballé » Des protections doivent
être prévues, en ce sens.
·
La vitesse varie proportionnellement
avec la tension d’alimentation des induits et inversement
proportionnellement avec l’induction magnétique. Si, pour une
raison quelconque, le magnétisme disparaît, le moteur va s‘emballer.
·
En générateur,
l’utilisation pour produire de fortes énergies, s‘est progressivement tarie, au
profit des autotransformateurs pilotés et redressés.
·
Ce type de machines sert
encore, comme génératrice tachymétrique. La
force électromotrice sera linéairement fonction de la vitesse de rotation. Il
n’est pas question dans ce cas, de travailler la matière d’œuvre énergétique,
mais informationnelle.
A petite vitesse, la présence
des charbons et du collecteur provoque des parasites qui risquent de perturber
la qualité de l’information vitesse.
1.
Les moteurs radiaux sans
charbons, mais avec l’équivalent d’un peigne d’alimentation.
·
Ils sont aussi appelés « Moteur à Entrefer Plan »
·
Ils sont « plus large
que long » Ils sont réversibles. Ils ont besoin d’une induction produite
par des bobines, qui ont le nom d’inducteur. La manière dont les inducteurs
seront couplés avec le reste de la machine, devrait déterminer le
type de machine rencontrée ; « série », « parallèle »,
etc., mais, on constate surtout des structures
« parallèles»
·
Ce type de moteur s’utilise
surtout dans des applications, où la vitesse est prépondérante, ou bien, là, où
les accélérations demandées sont particulièrement importantes.
·
La vitesse varie proportionnellement
avec la tension d’alimentation des induits et inversement
proportionnellement avec l’induction magnétique. Si, pour une
raison quelconque, le magnétisme disparaît, le moteur va s‘emballer.
·
Les moteurs radiaux risquent
peu de s’emballer, car beaucoup possèdent des inducteurs réalisés avec
des aimants permanents. Il faudrait que les inducteurs soient instantanément
réduits en poussières pour que cela se produise.
·
Ce type de moteurs n’est
pas, alors, très peu utilisé, comme générateur d’énergie ou tachymétrique.
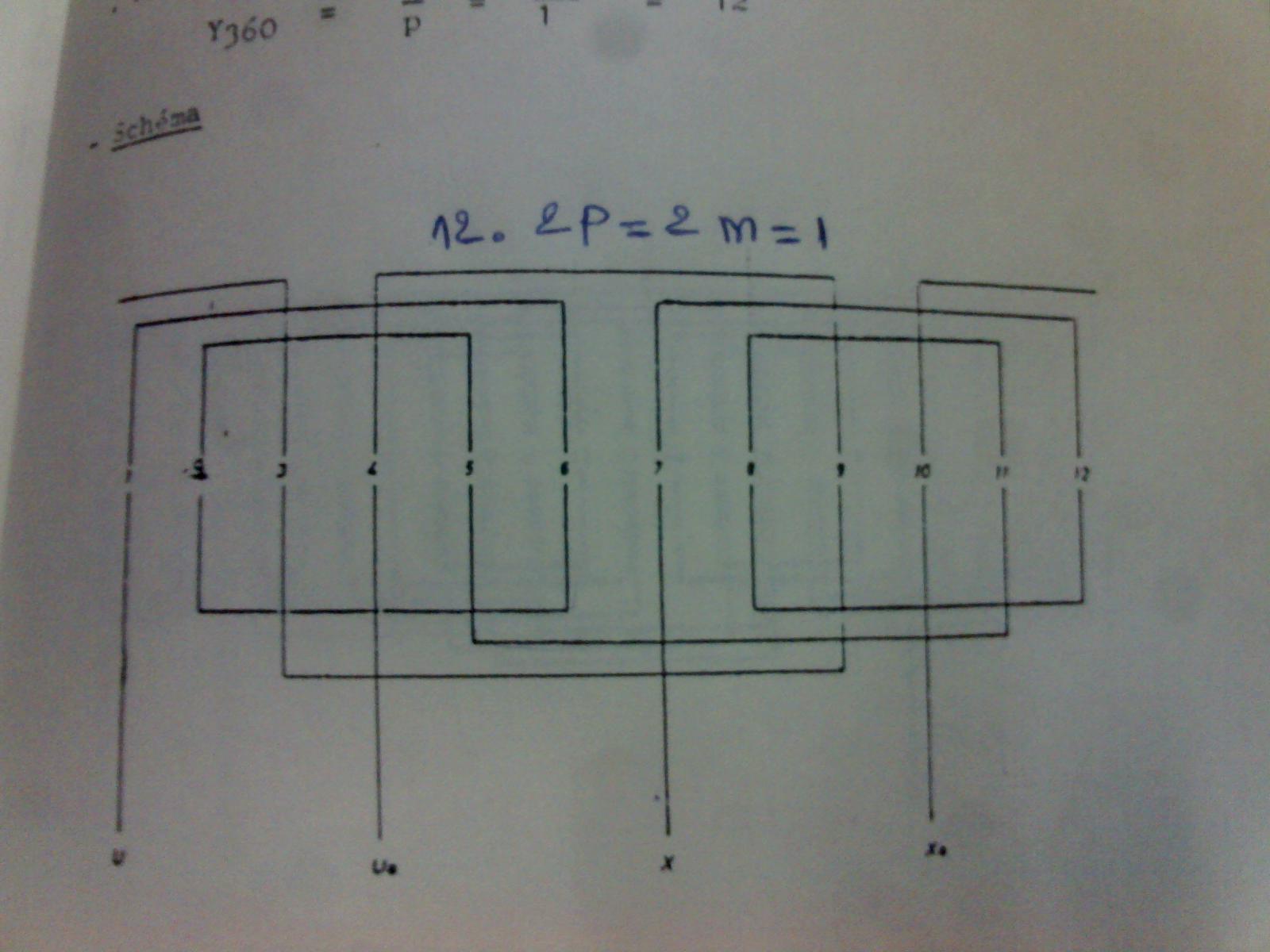
Schéma
de principe :
I.
Constitution des moteurs,
au niveau bobinage.
Pour pouvoir fonctionner, les machines à courant continu
doivent disposer, en totalité ou en partie, de 4 types
de bobines.
1. Les bobines inductrices, sur le rotor,
produisent soit du couple, soit une force électromotrice. Elles sont présentes sur tous les
types de machines. Dans le cas des moteurs radiaux, les fils se limitent à une suite de pistes
de cuivre gravées sur le disque du rotor.
2. Les bobines des inducteurs, sur le
stator. Elles ne produisent que du magnétisme. Si les inducteurs sont de type
série, ils seront réalisés avec des conducteurs de fortes sections. Ce qui leur
permettra de résister aux courants demandés par l’induit. Sinon les fils seront
de sections plus modestes.
Généralement, le courant dans les
inducteurs à connecter en parallèle, est 10 fois inférieur à celui rencontré
dans un induit.
Ces
bobines sont parfois absentes, si les
inducteurs sont réalisés avec des aimants permanents.
3. Les bobines de compensations, qui ne
se trouvent que dans les moteurs axiaux de fortes puissances. Elles
sont traversées par le courant principal
de l’induit et produisent un flux
supplémentaire à celui des inducteurs. Les moteurs radiaux et ceux de faibles
puissances n’en disposent pas.
·
Elles
servent à compenser une distorsion de flux qui se constate au niveau des
épanouissements polaires des inducteurs, avec la rotation de le l’induit.
·
Elles
compensent une diminution du flux des inducteurs qui se constate lorsque
l’induit est traversé par un fort courant. Ce dernier effet se nomme: la
réaction magnétique de l’induit.
4. Les bobines de commutation. Elles sont
sur le stator, au voisinage du collecteur, sur les moteurs axiaux.
Les
autres moteurs n’en possèdent pas.
Leur
présence se justifie surtout par un constat : le fait de créer un champ
magnétique au voisinage du collecteur limite l’apparition des étincelles sur
celui-ci.
Les
effets d’auto-induction tendent à limiter les courants de court-circuit qui se
produisent, lorsque deux encoches métalliques sont réunies fugitivement, par un
des « charbons »
Elles
sont connectées en parallèle, avec
l’induit.
Moteur axial.
L’étude
des circuits magnétiques d’induction, de compensation et de commutation ne sera
pas traitée dans cet ouvrage.
Les principales difficultés de conceptions et de
réalisation des bobines, se rencontrent surtout pour les rotors des moteurs de
type axial.
I. Les objectifs à atteindre seront les suivants :
Pour une constitution de
rotor donnée, avec :
·
Un
nombre d’encoches, donné et non modifiable.
·
Un
nombre de pôles et donc, de bobines d’inducteurs, donné.
·
Une
tension de travail connue.
·
Une
intensité de sortie maximum, désirée.
Il faudra :
1.
Etablir une stratégie simple de réalisation, avec un couplage des
différentes bobines. X bobines en série et Y, groupes de X bobines, en
parallèle.
2.
Réaliser en fonction de la stratégie choisie, une première
représentation, coté chignons, du bobinage. Ce sera permettra de
saisir le positionnement des différentes bobines.
3.
Choisir un des deux types de bobinages existants : ondulé ou
imbriqué et réaliser un schéma des connections côté collecteur.
Un
avantage : quel que soit le type
de bobinage choisi, ondulé ou imbriqué, le
principe permettant de trouver le schéma de positionnement des bobines côté
chignons est le même.
4.
Calculer le nombre de spires par bobines et la section des fils, en
fonction de l’intensité utile, et de la stratégie choisie.
5.
Vérifier si les encombrements prévisibles correspondent aux dimensions
du rotor.
6.
Réaliser le bobinage, si cela est possible.
I. Règles de base, à admettre et respecter.
Les règles citées correspondent à une réalité qui sa
s’imposer au fur et à mesure des démonstrations, de façon totalement naturelle.
Ces règles sont citées, au tout début, pour permettre à ceux qui veulent aller
vite, de travailler sans attendre les « grandes théories »
·
Le nombre d’encoches
d’un rotor ne sera jamais divisible par 3, et pas forcément pair. (11, 23, 34 …….. encoches)
·
Le nombre de pôles
sera toujours pairs et décomposable en puissance de 2 (2, 4, 8 etc), ou non
décomposable en nombre premiers (2 x 3 ; 2 x 5 ; etc.)
·
Tous les enroulements sont
constitués de bobines identiques, reliés entre elles, par des connections
séries ou parallèles.
·
Un groupe de bobines
câblées de façon à assurer seul, le bon fonctionnement de la machine prend le
nom d’enroulement.
·
Un enroulement complet
présente, par paire de pôles, deux
électromoteurs identiques, câblés naturellement en parallèle deux par deux, par le seul
fait du bobinage. Ils fournissent une force électromotrice (E),
pour les générateurs et contre-électromotrice (E’), pour les moteurs. La part
du bobinage qui assure cette génération d’électromoteur prend le nom de « voie d’enroulement ».
Exemple : un moteur
à 4 pôles à simple bobinage possède 2 fois 2 voies d’enroulements en
parallèles.
Il est nécessaire de mettre
chacune des deux groupes en parallèle.
·
Il ne faut pas confondre enroulement
d’un rotor de machines à courant continu et voies d’enroulement. Il peut y avoir un bobinage à faire avec 3 enroulements, constitués chacun par 4 voies d’enroulement.
·
Les bobines sont disposées,
en partie, dans les encoches du rotor du moteur.
Une grosse partie se trouve hors des encoches et doivent être correctement
disposées de façon à déséquilibrer le moins possible, le rotor. Comme pour un pneu de voiture il sera nécessaire de vérifier,
voire de rectifier l’équilibrage du rotor.
·
2 portions d’une
seule et même bobine, utilisent 2 encoches distinctes. Le groupe de
fils d’une bobine, présents dans une encoche prend le nom de « faisceaux »
·
Les fils constituant un
faisceau prennent le nom de « brins actifs », car c’est une des seules parties d’une bobine, à
générer une force ou à induire une force électromotrice.
·
Le nombre d’encoches entre
deux faisceaux d’une même bobine (en commençant par 1) se nommera
« largeur de section » et parfois,
se verra affublé de l’appellation « Y1 ».
Le nombre d’encoches pour aller
du faisceau de « sortie » d’une section vers de faisceau
« montant » ou « d’entrée » se nommera « Pas
avant » et parfois, se
verra affublé de l’appellation «Y2 »
Le
pas résultant est la différence des deux, telle que
« Y » = « Y1 » - « Y2 »
Certains bobineurs utilisent souvent ces définitions.
Il existe même une méthode mathématique, qui l’utilise conjointement avec les
principes des intervalles et des combinaisons ! La méthode développée ici, n’utilisera pas cette formulation, car elle
amène à mon avis, trop de développements mathématiques.
















































{kind=link}